SLAMDUNK Cartographer Review
Table of Contents
Abstract 및 Contribution
- We present the approach used in our backpack mapping platform which achieves real-time mapping and loop closure at 5cm resolution
- 본 논문에서는 5cm의 해상도를 가지는 지도를 실시간으로 Mapping 및 Loop 탐지를 할 수 있는 알고리즘을 제안하고 있습니다.
- To achieve real-time loop closure, we use a branch-and-bound approach for computing scan-to-submap matches as constraints.
- 이와 같은 실시간 Loop 탐지를 위해서, LiDAR 데이터와 SubMap(Local Map) 사이의 매칭을 제약조건으로 계산하기 위해 Branch-and-Bound라는 방식을 제안하고 있습니다.
Graph SLAM?
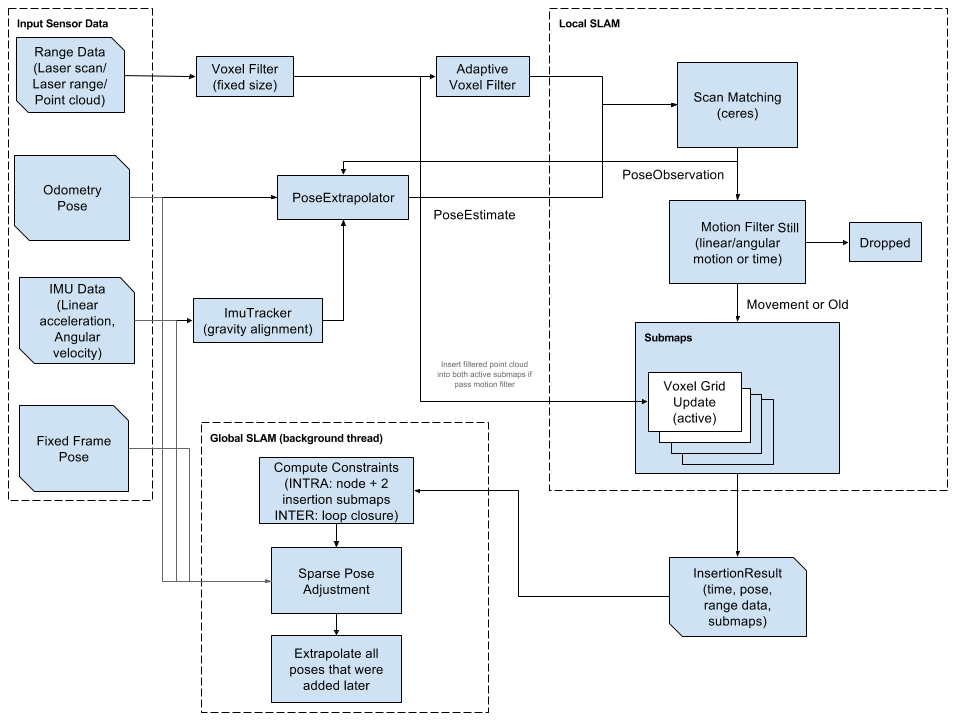
Graph SLAM은 크게 Local SLAM (Frontend)과 Global SLAM (Backend)로 구성됩니다.Local SLAM
Local SLAM은 입력으로 로봇의 움직임에 해당하는 정보(Pose)와 주변 환경에 대한 정보(Observation)를 받습니다.
- 대표적인 움직임에 해당하는 정보는
IMU, Odometry, GPS 등이 있습니다.
- 대표적인 주변 환경에 해당하는 정보는
LiDAR, Vision, Depth-Camera 등이 있습니다.
Local SLAM은 크게 2가지 역할이 있습니다.
Pose와 Observation 이용하여 Pose Trajectory를 생성합니다.- 생성된
Pose Trajectory와 Observation을 이용하여 Local Map을 생성합니다. (Occupancy Grid Map)
Local Map과 Pose Trajectory 사이에는 위치 정보에 대한 Constraint가 존재합니다.
Global SLAM
Global SLAM은 입력으로 Local Map들과 Pose에 대한 Observation 정보를 받습니다.Global SLAM은 Loop Closure Detection을 수행합니다.
- $T_1$에서 생성된
Local Map과 $T_{1000}$에서 얻은 Observation을 매칭하는 역할을 수행합니다.
- 이를 기반으로
Loop Closure Constraint를 생성합니다.
Local SLAM 및 Global SLAM을 통해 얻은 Node(Robot Pose, Landmark)와 Edge(Constraint)를 이용하여, Graph형태로 나타내고, 각 Node의 위치를 최적화하는 것이 Graph SLAM
Local Mapping
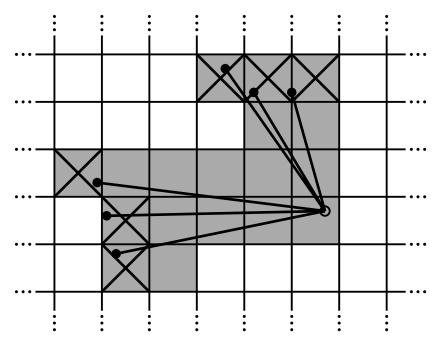
Occupancy Grid Map 형태의 Local Map 생성- 각
Cell은 log Odds를 기반으로 기록
- N개(파라미터로 조절 가능)의 연속된
Observation을 이용하여, 하나의 Local Map을 구성
- 각각의
Local Map은 생성 시점에서는 서로 독립적이며, 따라서 Local Map의 Quality는 Pose 정보의 정확도(Motion Model)에 달려있음.
Local Map생성 시, Noise 보정에 두 가지 알고리즘을 적용
Real-time correlated scan matcher 알고리즘은 Pose의 정확도가 높으면, 필요없으며, 정확도가 낮을수록, 성능에 큰 영향을 미침 (속도는 느린편)Ceres scan matcher 알고리즘은 수학적인 최적화가 있으며, 더 높은 정확도가 필요할 때 fine tuning을 위해 사용
- 아래 이미지의
[X]부분은 실제로 Observation이 측정된 위치이며, 회색 Cell은 Observation 되었지만, 측정값은 존재되지 않은 영역을 의미한다.
Loop Closure Detection
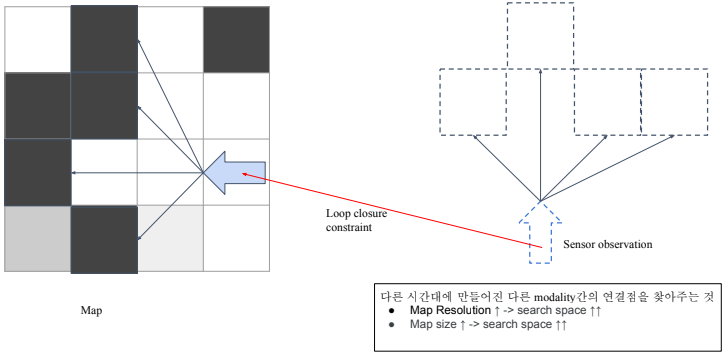
Cartographer에 대해 알아보기 전에, Loop Closure Detection에 대해 이해해야한다.Loop Closure Detection은 쉽게 말하면, 현재 Pose 및 Observation을 이용했을 때, 과거에 방문한 지역에 대한 재방문(과거의 Local Map)인지 아닌지를 판단하는 것을 의미한다.- 위에서 설명한
Global SLAM에서 수행하는 것처럼, 기존에 존재하는 Local Map과 현재의 Pose의 Observation을 비교하여, 유사한 정도를 파악하고, 이를 기반으로 방문 여부를 결정한다.
- 당연하게도
Local Map의 개수가 늘어날 수록(전체 지도 크기가 커질수록), 지도의 해상도가 높을수록 계산량이 늘어난다.
- 또한 이는
NP Hard문제이다. (모든 경우의 수를 일일이 다 확인해보는 것 외에는 풀 수 없는 문제)
Branch-and-Bound
- 앞서 얘기했던 것처럼,
Loop Closure Detection은 NP Hard문제이므로, 실시간 처리가 힘들다.
- 이를
Cartographer에서는 Branch-and-Bound 기법을 통해, 실시간 수준으로 계산한다고 한다.
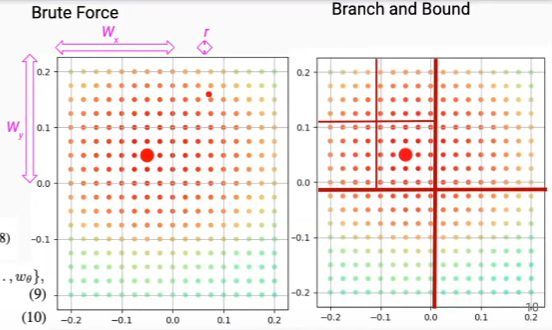
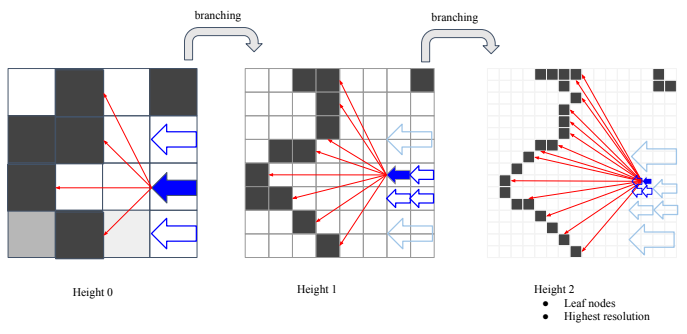
Branch-and-Bound는 Local Map 사이의 최적의 위치를 계산하기 위한 Tree 자료구조 기반의 탐색 알고리즘이며, 특정 Local Map 1개와 특정 Pose 1개에 대해, 최적의 위치를 찾는 알고리즘이다.Tree 자료구조의 각 Node는 위치 후보점들이며, Height가 깊어질수록 더 정밀한 위치가 된다.- 즉, 저해상도의 지도를 통해 대략적인
Pose를 먼저 확인한 후, 점점 고해상도의 지도를 이용하여 정확한 Pose를 찾는 방식
- 아래의 그림을 보면
Brute Force를 통해 전체를 다 찾는 방법에 비해, 더 빠른 결과를 얻을 것을 예상할 수 있다.
Cartographer
- 논문 이외의 오픈 소스
Cartographer에서 확인할 수 있는 내용
- ROS Independent하며, ROS Node도 제공하고 있다.
- ROS Independent하게 사용하려면, 센서 및 움직임에 대한 인터페이스의 구현이 필요
- 로봇에서 여러 개의 센서를 사용하더라도 다중 센서를 지원! (일반적인 다른 SLAM은 단일 센서를 지원하는 경우가 많음)
- 다중 로봇 지원 (Multi-Trajectory)
- 실내, 실외 구분 없이 사용 가능
IMU가 있는 Mobile Robot에서는 3D SLAM도 사용 가능Localization Only 기능 사용 가능
- 일반적인
AMCL과 같은 방식이 아닌 Cartographer Mapping과 동일한 방식을 통해 Localization에 사용 가능
- 생성되는
Pose Node의 길이를 windowing방식으로 제한하여, 실시간 최적화 가능 (Pose Node가 커지면, 계산량이 점점 늘어나기 때문)
Pose Graph의 업데이트 없이(Frozen Pose Graph), 현재 로봇의 Pose Graph와의 비교를 통해 inter trajectory constraint 또는 global constraint를 찾는 방식
Life-long Mapping 제공 (Continuous Mapping)Cloud Mapping 제공 (다수의 로봇을 둔 Server에서 Pose Graph Optimization을 진행)
GRPC 기반으로 동작- 각 로봇에서는
Localization only처럼 한정된 Pose Node만 유지
Cloud에서 Local Map(Frozen Pose Graph)를 로봇에게 지속적으로 업데이트Local Map Trimmer를 통해, 겹치는 Local Map을 지워주는 방식을 통해, Pose Graph의 크기에 비례하지 않고, 실제 공간의 크기에 비례하도록 함
TSDF(Truncated Signed Distance Function) 지도 형식 제공 (KinectFusion을 통해 유명해졌다고 함)- 3D Lidar Mapping의 경우,
Voxel이 아닌 Hybrid Grid를 통해, 2.5D Mapping을 하며, Visualization이 까다롭다고 함
Review
Cartographer를 실제로 돌려본 것은 오래되었으나, 실질적인 동작에 대해 확인하니, 더 대단하게 느껴지는 것 같다.Hector Mapping에서도 Branch-and-Bound와 같이, 낮은 해상도의 지도부터 비교하여, 높은 해상도까지 정밀하게 위치 추정을 하는 방법을 사용하는데, 추후에는 이에 해당하는 내용도 확인해봐야할 것 같다.- 개인적으로 튜닝이 좀 까다로운 편이라,
Gmapping을 좋아하는 편이긴한데, 코드 및 상세한 내용을 조금 더 이해하면 좋을 것 같다.
- 실제 논문과 코드와의 비교를 통해서, 구현 부분과 이론 부분이 어떻게 연결되는 지 확인하면 좋을 것 같다.
DFS등의 알고리즘 문제풀이에 사용되는 알고리즘이 실제 적용되는 것을 보니, 쓸데 없는 것을 하고 있지는 않았다(?)는 생각이 든다.